香港城大申亞京教授團隊《Advanced Intelligent Systems》:混合驅動軟連續體機器人實現大轉角和高精度操作
發布日期:2021-09-01
瀏覽量:1169次

對于生物醫學領域的多個應用場景(心血管手術、支氣管手術等),小型軟連續體機器人都展現了其巨大的應用潛力(圖1a)。然而,現有的連續體機器人卻在驅動選擇方面經歷相應的瓶頸期,其難以同時擁有小尺寸、柔順驅動、大轉角以及高精度操作等特性,因而在一定程度上限制了其在體內某些狹長受限環境下的廣泛應用。而傳統的加工制造方法不能很好的實現驅動方式綜合性能的改善。
近日,香港城市大學生物醫學工程系申亞京教授帶領的研究團隊開發了一款毫米級的軟連續體機器人(圖1),其在線控和磁場的混合驅動模式下同時擁有大轉角和高精度操作能力。為了實現毫米級外形尺寸的混合驅動,該團隊基于摩方精密(BMF)超高精度光固化3D打印機nanoArch P140打印出超薄的鏤空型機器人骨架(長度30mm,外徑3.0mm,壁厚300μm),并在薄壁上形成150μm的貫穿孔用于腱索的布置。此外,該團隊通過在機器人骨架外表面涂覆鐵磁彈性體薄層(100~150μm)來獲得磁響應性能。所提出的混合驅動軟連續體機器人能實現約100°的大角度導向以及高精度(靜定位精度低至2μm,動態跟蹤精度低至10μm)的微操作。該成果以“Millimeter-scale Soft ContinuumRobot for Large Angle and High Precision Manipulation by Hybrid Actuation”為題發表在Advanced Intelligent Systems上。
https://doi.org/10.1002/aisy.202000189
在該工作中,所研發的毫米級軟連續體機器人整體示意如圖1所示。圖一b左上角展現了機器人在目標區域—狹長受限環境內的導向能力。其中,線控功能由兩對拮抗型腱索的拉緊/放松策略來實現,而磁驅性能則來自于彈性表皮中定向排列的鐵磁顆粒在外加磁場中受力/力矩導致的偏轉。在微尺度光固化3D打印技術的加持下,該連續體機器人擁有較大的中空腔體,這一特性為后續多種微創手術器械的攜帶創造了條件。
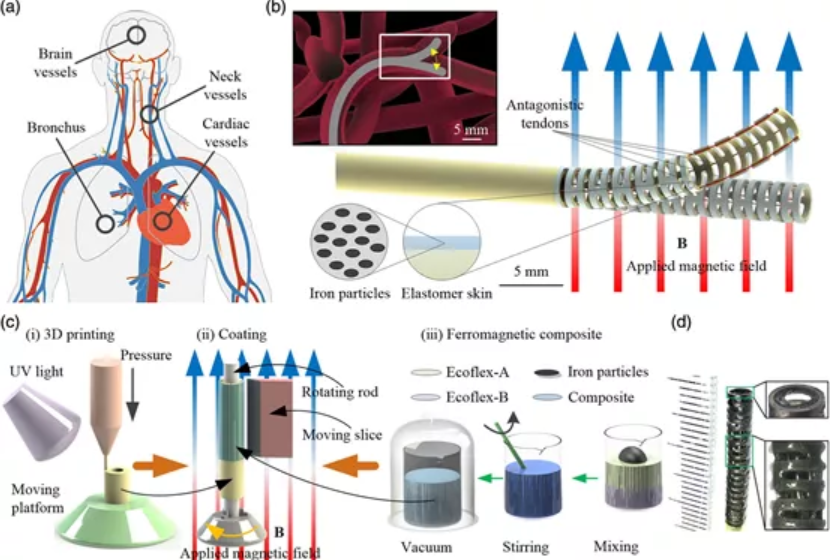
圖1. 毫米尺度軟連續體機器人整體示意圖。
先使用摩方精密(BMF)nanoArch P140打印出超薄的鏤空型機器人骨架(長度30mm,外徑3.0mm,壁厚300μm),并在薄壁上形成150μm的貫穿孔用于腱索的布置;再通過在機器人骨架外表面涂覆鐵磁彈性體薄層(100~150μm)來獲得磁響應性能。
該混合驅動機器人的大轉角導向能力及高精度操作性能驗證如圖2所示。線驅模式下,軟連續體機器人成功在具有多個三維分叉的狹長受限管道內實現了導向行進(如圖2a,b)。而在外加磁場的驅動下,該機器人展現了極好的動態跟蹤效果(如圖2c,d)。
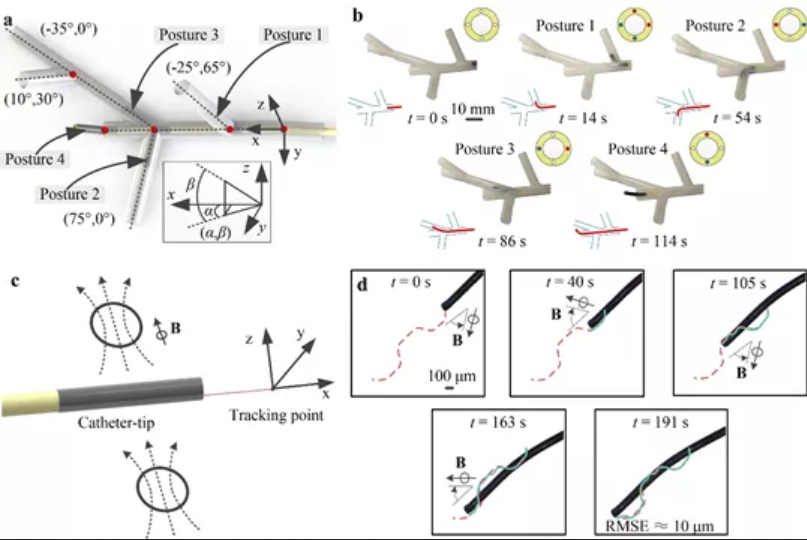
圖2. 大轉角導向能力及高精度操作性能驗證
受益于線驅模式的大轉角導向以及較好的抵抗外力的能力,該軟連續體機器人能夠在狹窄血管模型中實現病理區域的搜尋(如圖3a)。將所攜帶的微創手術工具遞送至前端之后(圖3b),該機器人可在外磁場的驅動下實現高精度的微操作(圖3c),并進一步完成例如微注射和微切除(圖3d)等工作。此外,磁驅模式下,所研發的毫米級軟連續體機器人通過攜帶鼻咽拭子展現了鼻咽采樣的現實功能(如圖3e,f),其為當前新冠疫情的采樣檢測提供了新的思路。
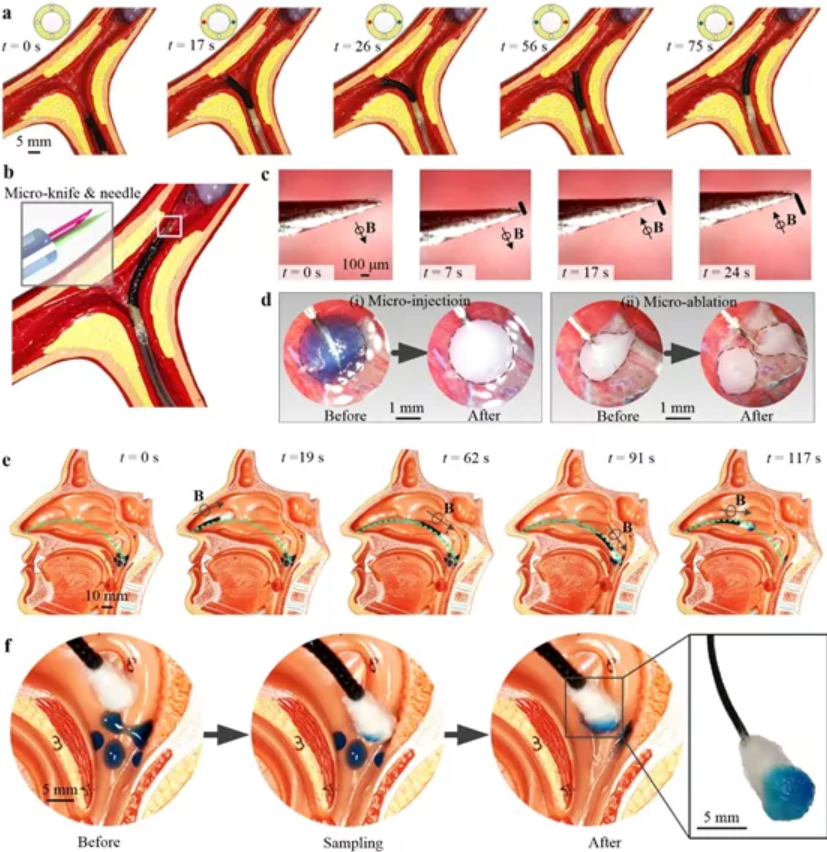
圖3. 生物醫學應用場景
總而言之,該工作中所提出的結合了微尺度光固化3D打印技術而得到的毫米級軟連續體機器人同時具備小尺寸、柔順驅動、大轉角、高精度等特性,其在狹長受限環境下展現了優異的運動操作性能。與此同時,此項工作也為連續體機器人的小型化設計提供了一種新的方法,并將在生物醫學工程領域展現更大的應用潛力。